

Situation[1]
Sprache, wählbare Sprache
SPAS[2]
Stabilitäts-Prozeßzustand[3]
Starker Zusammenhang[4]
Statement - Sequence of Letters and digits[5]
Statische Prozeßvariable[6]
Steuerung[7]
Steuerungs-System[8]
Strukturierte Datentypen - User Defined Types[9]
Strukur-Stabilität, strukurstabil[10]
Zurück zu den Buttons
[1]
Prozeßsituation
Für die Dauer der Ausführung einer Operation, z.B. O7, ändert sich deren Halte- oder Stabilitäts-Prozeßzustand, P77, nicht. Enthält er im PRAP mehrere Pfade, so kann es sein, daß zwischen ihnen die Belegung der P-Variablen während der Situationsdauer wechselt.
Die beiden zusammengehörigen Größen Operation und Halteprozeßzustand stellen eine Prozeßsituation Sit7 = (O7, P77) dar, auch kurz mit Situation bezeichnet.
Übergangssituationen gibt es nicht, nur Übergangs-Prozeßzustände,weil die Übergangsdauer zwischen Situationen im PRAP null ist. Die Steuereinrichtung benötigt dazu genau einen Arbeitszyklus.
Eine Situation kann auch als WHILE P77 DO O7 gelesen werden, oder REPEAT O7 UNTIL(P77 = false)
[2] Software-Projektierungswerkzeug für Automatische Steuerungen bedeutet das Kunstwort SPAS.
[3] Als Stabilitäts-Prozeßzustand = Self Transition (kurz: Stabilitätszustand) bzw.Halteprozeßzustand (kurz Haltezustand) werden alle Pfade bezeichnet, die eine betrachtete Operation Oi mit sich selbst verbinden. Aus Sicht der Graphentheorie bilden Oi und der Stabilitätszustand Pii einen Zyklus. Ein Haltezustand ist Voraussetzung zur Ausführung der zugehörigen Operation. Der Halteprozeßzustand ist folglich nur eine spezielle Form eines Übergangsprozeßzustandes mit gleicher Start- und Zieloperation.
Ergibt sich durch die Belegung der Prozeßvariablen zu einer erreichten Operation kein Pfad des Haltezustandes, so wird sie durchlaufen.
Werden mehrere Operationen durchlaufen, so daß die Operation Oi wieder erreicht wird, spricht man von einem instabilen Zyklus.
Eine Operation zusammen mit ihrem Halteprozeßzustand bzw. Stabilitätsprozeßzustand, nennt man Situation, die solange erhalten (stabil) bleibt, wie der Haltezustand erfüllt wird.
Jede Situation wird im Compilat als (Automaten)Zustand behandelt.
[4] Ein Graph ist stark zusammenhängend, wenn von einem Knoten Kj jeder andere Knoten Kk und auch Kj wieder selbst über einen Weg erreicht werden kann.
Stark Zusammenhängend (= strong connected) ist ein PRAP, wenn ausgehend von einer Operation Oj jede andere Operation Ok und sie selbst erreicht werden kann.
Ein Weg in einem Graph setzt sich aus mehreren Pfaden zusammen. Dabei ist im PRAP diese Zusammensetzung auch mit einem Wertewechsel der P-Variablen in Pfaden zugelassen.
[5] Es sind alle druckbaren Zeichen erlaubt. Die Anzahl ist mit 64 begrenzt.
Ein Zeilenumbruch mit "Enter" ist nicht zugelassen. Zu lange Zeilen werden automatisch bei einem Leerzeichen umgebrochen. Wollen Sie eine Text-Trennung vorher erreichen, dann mit "- " oder auch mehr Leerzeichen.
Eine Text-Trennung kürzerer Texte ist mit "\n " zu notieren; falls ein "-" erwünscht ist, muß dies vorher stehen. Das Leerzeichen nach \n nicht vergessen!
[6] Eine Prozeßvariable heißt statisch, wenn sie eine neue Aussage mindestens solange beibehält, wie eine oder mehrere davon abhängige stabile Operationen auf den Prozeß einwirken.
[7] Hier sind Binärsteuerungen = binary control gemeint.
Es braucht nicht in Verknüpfungs- und Folgesteuerungen unterschieden zu werden, weil das Entwurfsverfahren mit Hilfe des PRAP das erübrigt, also PreCOM dies automatisch erkennt und im Compilat verwirklicht.
[8]
Steuerungs-System
Mit diesem Begriff ist gemeint, wenn im Ergebnis der Prozeßzerlegung und der Binären Prozeßanalyse eine Anzahl gekoppelter Teilprozesse vorliegt.
Teilsysteme können z.B. dadurch entstehen, daß ein (Gesamt-)Steuerungs-System zerlegt wird, um auf mehreren Steuer-Geräten (Ressourcen) verteilt zu werden. Das Zerlegen "durchtrennt" Koppelungen, die im Gesamtsystem vorgesehen waren.
Jedes Teilsystem wird auf einer Ressource implementiert und kommuniziert mit Nachbarsystemen so, daß die Koppelungen als Access Paths ausgewiesen die Gesamtfunktion garantieren.
[9] Der Begriff Struktur sagt aus, daß es eine Menge Elemente gibt, die untereinander zumeist paarweise eine Relation besitzen.
Die Elemente sind hier Variable, jede mit dem ihr zugeordnetem Datentyp. Die Relation der Variablen ist die Zugehörigkeit zu einem Bezeichner, Name der Struktur, einer Baum-Struktur.
Die Norm IEC 1131-3 nennt unter dem Abschnitt "Derived data types" auch die "STRUCT declaration" und meint damit structured data types.
Zu den Elementen gehören die elementaren Datentypen wie BOOL bis REAL, ferner die Standard-Funktionstypen TON, CDUD, TIME, DATE usw., und es werden alle PRAP-Typen als funktionelle Strukturen eingeordnet sowie die (baum-)strukturierten Datentypen.
Der Projektant eines Automatisierungssystems kann in SPaS sogenannte User Defined Types (UDT, angelehnt an SIEMENS) definieren.
Siehe auch: Einfügen von UDT in Ressourcen
[10]
Strukturstabilität:
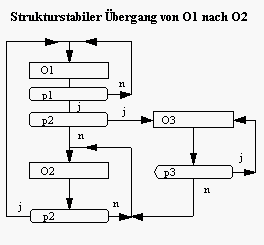 Ein Übergang von einer Operation Oi zur Folgeoperation Ok heißt strukturstabil, wenn der Haltezustand zu Ok abhäng von Bedingungen des Übergangszustandes erfüllt wird.
Ein Übergang von einer Operation Oi zur Folgeoperation Ok heißt strukturstabil, wenn der Haltezustand zu Ok abhäng von Bedingungen des Übergangszustandes erfüllt wird.
In der Abbildung ist zu sehen, daß im Übergang von Operation 1 zu Operation 2 schon eine Bedingung, die Prozeßvariable p2 = nein-Belegung, für die Stabilität der Operation 2 (sprich für den Haltezustand der Operation 2) enthalten ist.
Der Übergang von Operation 1 zu Operation 3 ist bedingungsstabil.
