

Im Rahmen der binären Prozeßanalyse werden ausschließlich Zeitglieder mit Einschaltverzögerung - nach IEC 1131-3 die Standardfunktion TON - benötigt, da im PRAP alle Zeitfunktionen damit erfaßbar sind. Das Projektieren von Zeitgliedern erfolgt selbstverständlich unabhängig vom Hersteller der praktisch eingesetzten Ressource. Daher sind nur solche Anschlüsse vorgesehen, die international vereinbart wurden.
Jedes Zeitglied erhält einen Namen (Name) als Identifikator und eine Bezeichnung (Statement). 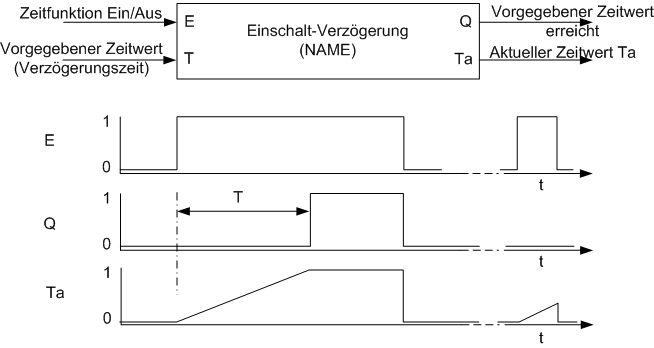
Anschlußbezeichnungen gemäß IEC1131-3[1]
Die im Zeitdiagramm dargestellte Funktion eines Zeitgliedes mit Einschaltverzögerung enthält alle wichtigen Eigenschaften:
Start der Verzögerungszeit T mit dem Einschalten des Eingangs E (E schaltet ebenso das Zeitglied ab)
Ausgang Q schaltet ein, sobald T beendet ist
Bei kürzerer Einschaltdauer als T bleibt Q ausgeschaltet
Q schaltet zusammen mit E aus
Im Teilprozeß[2] verwenden Sie für E eine technologisch passende Bezeichnung einer Operationsvariablen. Für den Ausgang Q formulieren Sie die technologisch sinnvolle Prozeßzustandsvariable. Diese Form des Vorgehens entspricht dem Informationsflußmodell.
![[Tip]](../graphics/tip.png) |
|
Beide Variablen können Sie selbst adressieren oder die Zuweisung einer Merkervariablen dem Precompiler[4] überlassen.
Beispiele:
Operationsvariable bewertet
Füllkontrollzeit ein / aus
Anlaufwarnzeit Start/Stop
Prozeßvariable bewertet
Füllkontrolldauer zu Ende ja/nein
Anlaufwarnung beendet ja/nein
Wichtige Hinweise:
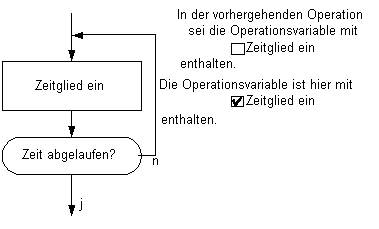
Beginnen Sie bei der Konfigurierung des Zeitgliedes immer mit der Operationsvariablen, die das Zeitglied steuert.
Die Operation, in der Sie das Zeitglied einschalten müssen, wird durch den Prozeßablauf bestimmt.
Dort ist die Operationsvariable zu markieren. Diese Operationsvariable muß bezüglich ihrer Verwendung (USAGE) als "Local Static" oder "Output" gekennzeichnet werden.
Sie können ein solches Zeitglied auch über mehrere Operationen eingeschaltet lassen (siehe Tip). Aber das Abschalten muß spätestens in einer Operation vor dem (Wieder-)Einschalten erfolgen, weil damit auch die Verzögerungszeit T wieder neu geladen und gestartet werden kann.Die Prozeßvariable eines Zeitgliedes, also den Ausgang Q, können Sie wie jede andere benutzen, also nicht nur in dem Teilprozeß, in dem Sie das Zeitglied starten, etwa um sie im Sinne einer natürlichen Koppelung zu verwenden. Dann muß die Variablenverwendung mit "Input/Output" angegeben werden, anderenfalls mit "Local Static".
Sie brauchen diese aber auch überhaupt nicht zu projektieren, also nicht "abzufragen", sofern der Hersteller der Hardware das zuläßt. Sie können durch Vergleich ermitteln, welche "Teil"-Zeit abgelaufen ist (Timer-Vergleich).
![[Warning]](../graphics/warning.png) |
|
Projektierungs-Ablauf
Der Beginn erfolgt durch Betätigen der rechten Maustaste auf die Operation, in der ein Timer eingeschaltet werden soll. Danach "Data Access"-Klick (oder Doppelklick[5])und eine neue Variable einführen und markieren, die den Timer ein- und ausschalten soll (Eingang E). Schreiben Sie das Statement ein und klicken auf  , um "Variable Name (Flag)" als neue Variable benennen zu können. Im nachfolgenden Bild sehen Sie ein Beispiel aus dem PRAP "Stern-Dreieck-Anlauf".
, um "Variable Name (Flag)" als neue Variable benennen zu können. Im nachfolgenden Bild sehen Sie ein Beispiel aus dem PRAP "Stern-Dreieck-Anlauf".
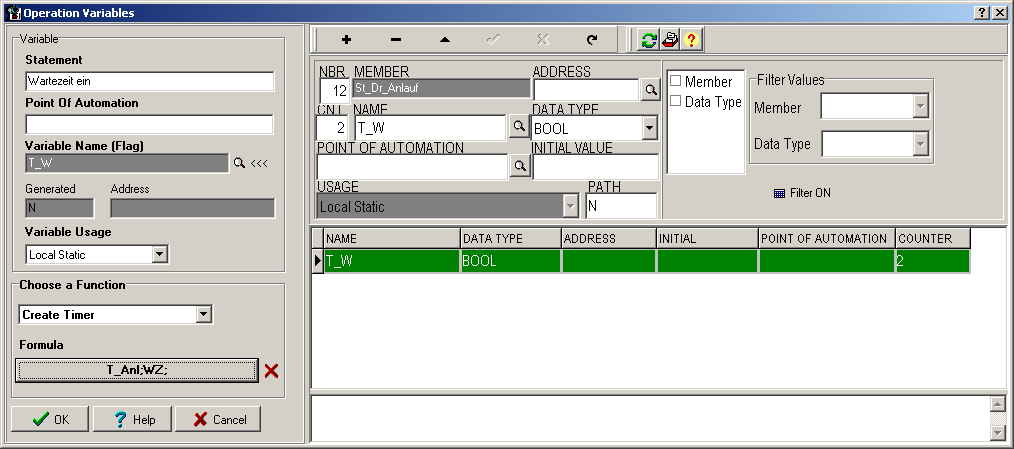
Die "Übernahme" des Namens erreichen Sie mit KLick auf  , danach geben Sie "Output" als USAGE an und wählen bei "Choose Function" die Funktion "Create TIMER". Ein Klick auf "Formula - None" öffnet die Timer-Configuration:
, danach geben Sie "Output" als USAGE an und wählen bei "Choose Function" die Funktion "Create TIMER". Ein Klick auf "Formula - None" öffnet die Timer-Configuration:
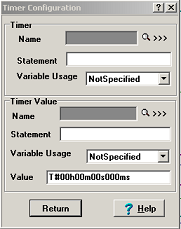
Benutzen Sie bitte die angebotenen Hilfetexte.
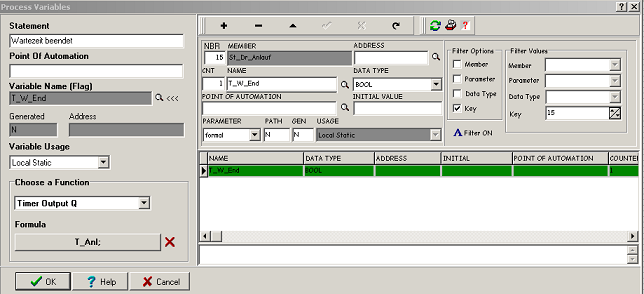
Die Q-Variable des Timers enthält eine "Condition". Stellen Sie auf dieses Langrund den Cursor, betätigen Sie die rechte Maustaste, und nach Klick auf "Data Access" (oder [6]) finden Sie ein ähnliches Formular vor wie für die Ein-Ausschaltvariable, hier wieder das Beispiel aus der Stern-Dreieck-Anlaufschaltung:
Benutzen Sie bitte die dort angebotenen Hilfetexte.
Weitere Einzelheiten zum Konfigurieren siehe: Timer-Projektierung
Ein ausgeführtes Beispiel finden Sie bei Stern-Dreieck-Anlaufschaltung, Projektieren des Zeitgliedes.
[2]
Teilprozeß, kurz TP, heißt jede Einheit aus dem gesamten Steuerungsbereich (im Prozeßzerlegungsgraphen zu erkennen) eines Prozesses.
Ist ein Teilprozeß durch einen PRAP beschrieben, so stellt der PRAP eine Teilprozeßbeschreibung dar. Dabei sind die Variablen formaler Natur, sind also nicht mit direkten Adressen verbunden. Der PRAP ist daher der Typ des TP, dessen Variable jedoch adressiert bzw. Konstante sind. Sie heißen aktuale Parameter, weil sie für den TP speziell gelten. Jeder TP ist demnach eine Instanz des PRAP.
Auch eine Stabilisierungsaufgabe für eine oder mehrere Prozeßgrößen, also eine Regelungsaufgabe, ist ein Teilprozeß, der z.B. durch ein PID-Modell beschrieben wird.
Jeder PRAP muß einen einmaligen Namen pro Ressource haben. Jeder Teilprozeß als Instanz eines Typen-PRAP muß einen einmaligen Namen in "seinem" PROGRAM haben. Er muß im Prozeßzerlegungsgraphen - PZG - dieser Ressource enthalten sein.
Wichtige Eigenschaft eines TP:
Jeder Teilprozeß aus dem PZG ist als Instanz oder als Unikat zu verstehen. Zu jedem Teilprozeß gehört eine Anzahl Eingangssvariable und Ausgangsvariable. In keinem anderen Teilprozeß des Teil-Projektes, also innerhalb einer Ressource, darf es dieselben Ausgangsvariablen, im Blick auf die Instanz - dieselben Ausgangsvariablen mit direkten Booleschen Adressen - nicht nocheinmal geben! Mengentheoretisch bedeutet dies, daß die Schnittmenge der Mengen der Ausgangsvariablen zweier TP leer ist.
Die durch arithmetische oder Kopier-Ausdrücke sich ergebenden Ausgangsvariablen dürfen in mehreren Instanzen dann gleich sein, wenn sie nicht innerhalb eines Arbeitszyklus' der Steuereinrichtung "geschrieben" werden.
[3]
Prozeßsituation
Für die Dauer der Ausführung einer Operation, z.B. O7, ändert sich deren Halte- oder Stabilitäts-Prozeßzustand, P77, nicht. Enthält er im PRAP mehrere Pfade, so kann es sein, daß zwischen ihnen die Belegung der P-Variablen während der Situationsdauer wechselt.
Die beiden zusammengehörigen Größen Operation und Halteprozeßzustand stellen eine Prozeßsituation Sit7 = (O7, P77) dar, auch kurz mit Situation bezeichnet.
Übergangssituationen gibt es nicht, nur Übergangs-Prozeßzustände,weil die Übergangsdauer zwischen Situationen im PRAP null ist. Die Steuereinrichtung benötigt dazu genau einen Arbeitszyklus.
Eine Situation kann auch als WHILE P77 DO O7 gelesen werden, oder REPEAT O7 UNTIL(P77 = false)
[4] PreCOM ist die Abkürzung von Precompiler, Vorübersetzer. Damit wird aus einem Steuerungsprojekt ein Steuerungsprogramm erzeugt, allerdings im Quellcode, der mittels zugehöriger Software zur Zielmaschine (Ressource wie SPS, Microcontroller usw.) in den Maschinencode zu übersetzen und zu implementieren ist.
[5] Den Datenzugriff ("Data Access") erhalten Sie auch direkt, wenn Sie zwei Mal hintereinander die linke Maustaste klicken (Doppelklick).
[6] Den Datenzugriff ("Data Access") erhalten Sie auch direkt, wenn Sie zwei Mal hintereinander die linke Maustaste klicken (Doppelklick).
